
ポケット・クエリーズは鴻池組と共同で進める「四足歩行ロボットによる施工管理自動化プロジェクト」で、山岳トンネル建設現場の切羽(掘削最前線)を対象とした実証実験を実施し、無人探査と施工管理データの取得に成功した。

実験は発破直後の切羽という崩落や肌落ち、有害ガス発生などの危険を伴う環境下で、四足歩行ロボットが人に代わって先行進入し、各種データ取得を行った。注目されたのは、「危険区域に人が入る前に安全確認を完了できる」施工管理フローの実現可能性を示した点だ。
使用機体は中国Unitree Robotics製の四足歩行ロボット「Unitree B2-W」。不整地環境に対応可能な歩行性能を活かし、凹凸の大きい切羽周辺でも自律走行および遠隔操作による進入を実施した。
実証では主に3項目について有効性を確認した。1つ目は危険エリアへの完全無人探査で発破後の不安定な地山環境に対し、ロボットが先行進入することで、人間が直接立ち入ることなく現場状況を確認できることを実証した。
2つ目は有害ガスのリアルタイムモニタリングとなり、ロボット搭載のガス検知センサーを用いて、酸素濃度や可燃性・有毒ガスの有無を遠隔監視した。これにより作業員の入坑可否を客観的データに基づき判断できる体制構築につながる成果を得た。
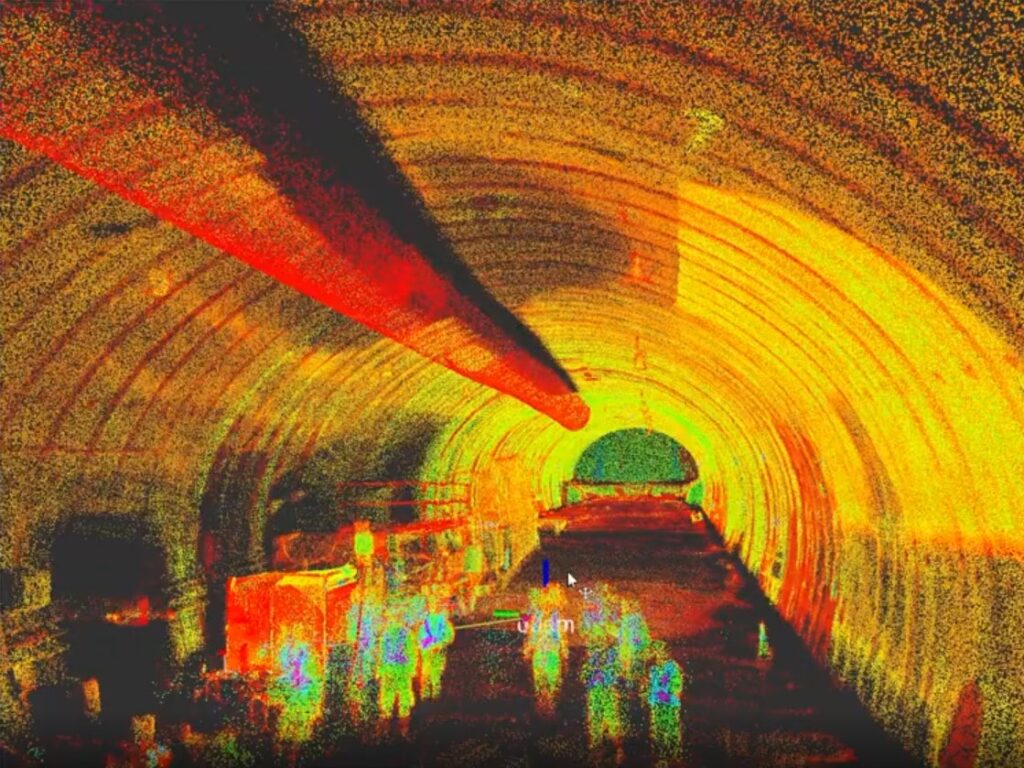
3つ目はLiDARによる高精度3D点群取得だ。レーザー計測によって切羽および坑道形状を3Dデータ化し、BIM/CIMとの連携可能性を確認した。取得した点群データは、施工進捗管理や経時変化モニタリングなどへの応用を想定している。
従来、切羽の確認は作業員が直接現場に入って行う必要があり、安全確保が大きな課題となっていたが、今回の成果では「危険箇所の初動確認をロボットが代替する」という新たな施工管理モデルを現場レベルで示した。
両社は今後、崩落後のより過酷な不整地への対応や長時間運用に向けた通信安定性向上、点群データから施工進捗を自動解析するアルゴリズム開発などを進める方針。今回の実証は山岳トンネル施工における安全管理の高度化と無人化施工の実装に向けた重要な一歩となりそうだ。
ポケット・クエリーズのプレスリリースはこちら