
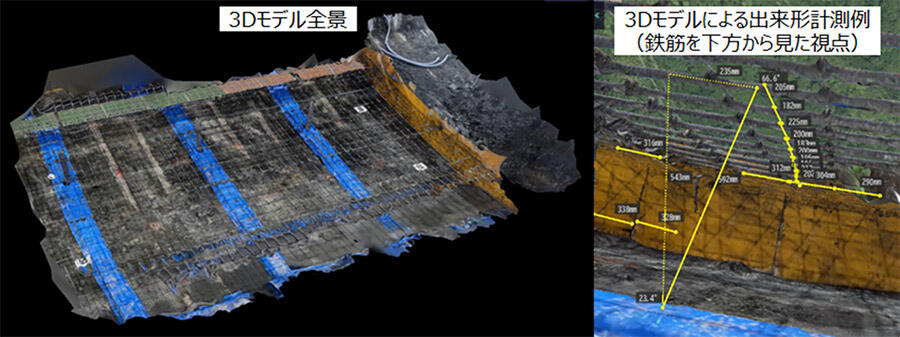
戸田建設は建ロボテックと協力し、山岳トンネル底部でインバートの曲面形状により傾斜した鉄筋上を安定して走行する出来形計測ロボットを開発した。ロボットで撮影した動画から3Dモデルを生成し、任意箇所の出来形計測を可能にすることで、従来のスケールを用いた計測が不要となり、計測作業の省力化に加え、出来形の面的な管理や、BIM/CIMモデルとのデータ連携を実現した。
山岳トンネル工事におけるインバート鉄筋の出来形計測は、足場の不安定な鉄筋上で現場職員がスケールを用いて手作業で行っており、安全面・効率面で課題があった。計測結果が点的な記録にとどまるため、出来形を面的に把握できず、取得したデータを事後に活用しにくいという課題もあった。
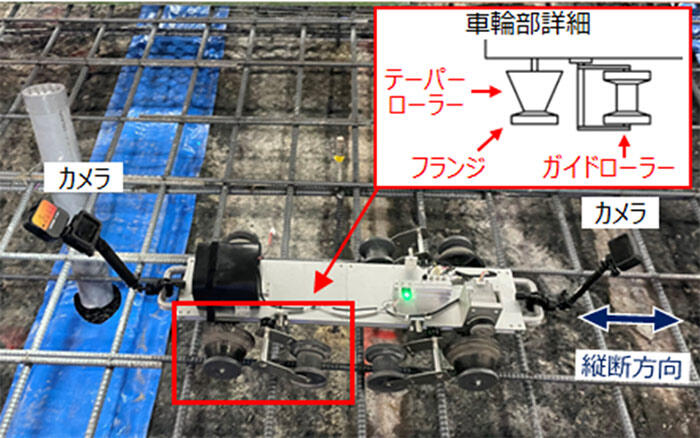
開発したロボットは、直線状の鉄筋2本をレールとして、走行用の車輪により縦断方向に自走する。重ね継手部では車体左右の鉄筋の高低差や幅の変化で車輪が鉄筋から外れる脱落の問題があったが、車輪の内側をテーパー形状にするなどの対応で安定した走行を実現した。
ロボットの前後に1台ずつ搭載したカメラで撮影した動画を用いて生成した3Dモデルから任意箇所の出来形を計測できるため、従来のスケールによる計測は不要となるほか、コンクリート打設後も鉄筋の出来形を確認でき、ARマーカーを用いて3Dモデルに座標を付与することで、施工記録としてBIM/CIMモデルに統合し、維持管理へ引き継ぐことも可能にした。同社施工中の新名神高速道路宇治田原トンネル東工事で検証した。
また、インバート鉄筋と同時に取得した床掘形状の情報に、インバートの設計形状を組み合わせることで、打設コンクリートの数量を算出することが可能になり、これを自動発注システムなどと連携させることも可能という。ロボットにインバート鉄筋の結束機能を追加し、結束作業と出来形計測を同時に自動化することで、さらなる省力化と効率的な出来形管理への実現にもつながるという。
戸田建設のプレスリリースはこちら