
アールティ(東京都千代田区)は、開発を進める国産四足歩行ロボットの実証実験を、東急建設が施工する建築現場で行い、インフラ点検など特定用途に限定されない四足歩行ロボット活用の可能性を確認し、今後の実用化に向けた課題の整理と技術開発につなげる成果を得た。

近年、社会インフラや産業現場を取り巻く環境は大きく変化し、労働力不足や作業環境の高度化への対応に加え、経済安全保障の観点からも、国産四足歩行ロボットによる巡視・点検・遠隔支援への期待が高まっている。ただ、現場では必ずしもロボットフレンドリーな環境とは言えず、実用化に向けては多くの現場実証実験が必要になる。
両社の実証では2025年11月から12月にかけて実施したもので、東急建設が実装を進めているロボット用無線通信ネットワークの技術検証と、アールティの国産四足歩行ロボットの現場環境下における実地検証の2つを兼ねた。
実証を通じてアールティは、建築現場に限らず不整地や環境変化を伴う多様な現場で四足歩行ロボットが安定して稼働し、通信ネットワークを介した情報取得・共有が可能であるかを検証した。東急建設から提供されたカメラなどの外部機器を搭載した状態でロボットを走行させ、建築現場に限らず、インフラ点検、プラント、災害対応など、多様な分野への展開を見据えた開発課題および基礎的な知見も得ることができたという。
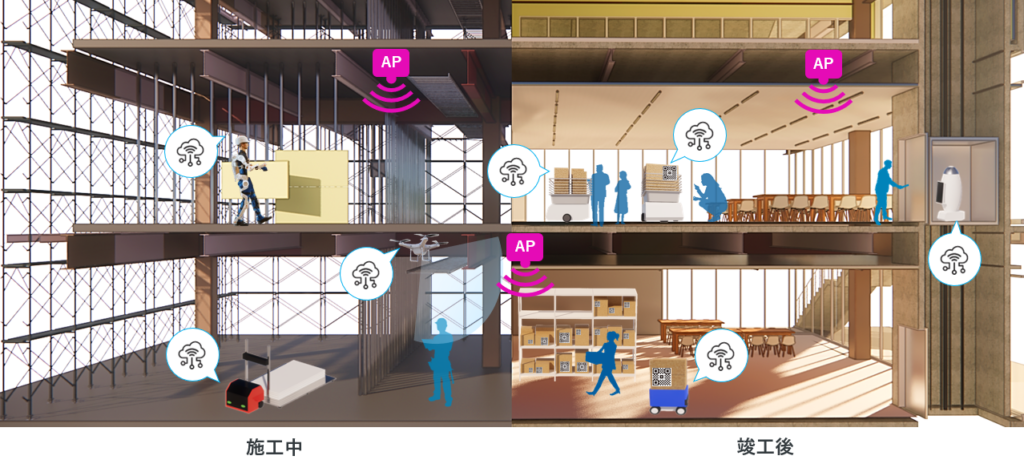
また、東急建設では建築物に適用する「人協調型ロボティクスの社会実装技術開発」の共同研究を東京都市大学と展開中。大学横浜キャンパスに建設する新研究棟でロボットとエレベーターが連携する機能や、ロボットが利用するIoT無線ネットワークの基本機能を実装する計画で、人協調型ロボティクスを活用するサービスの立案に加え、BIMを活用した各種サービスに必要なロボットフレンドリー環境の設計や実装についても検証していく。