
ポケット・クエリーズ(東京都新宿区)は建築研究所と共同で、ヒューマノイドロボットと四足歩行ロボットの協調制御による無人化システム開発に着手した。最先端のフィジカルAIと複数ロボットの協調制御技術を社会実装することで、危険を伴う被災地調査の完全無人化と、調査業務の抜本的な効率化につなげることが狙い。日本政府が掲げる「重点投資対象17分野」の中核を担う技術開発になる。
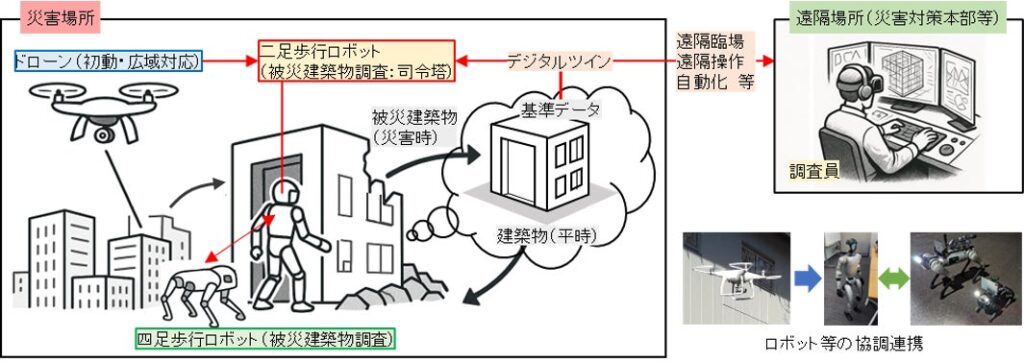
両社は、これまで共同研究「四足歩行ロボット×デジタル技術の開発と災害時の活用検証」を通じて、複数の四足歩行ロボットによる建物調査技術の開発や、現実空間を仮想空間に再現するデジタルツインを用いた遠隔操作システムの構築など、被災地調査の安全性向上に取り組んできた。
共同研究は、これまでの実証実験で得られた成果と課題を踏まえ、さらなる技術的飛躍を目指すもので、従来の四足歩行ロボット単体では困難であった人間用機材を用いた高度な調査作業や現場での直感的な状況判断を実現する新たに二足歩行ロボットの導入を推し進める。
ドローンによる上空スクリーニング、四足歩行ロボットによる不整地移動支援と組み合わせ、協調動作を通じて平常時から災害初動・復旧段階まで一貫して運用可能な「フェーズフリーな無人調査システム」を開発することを目的としているという。
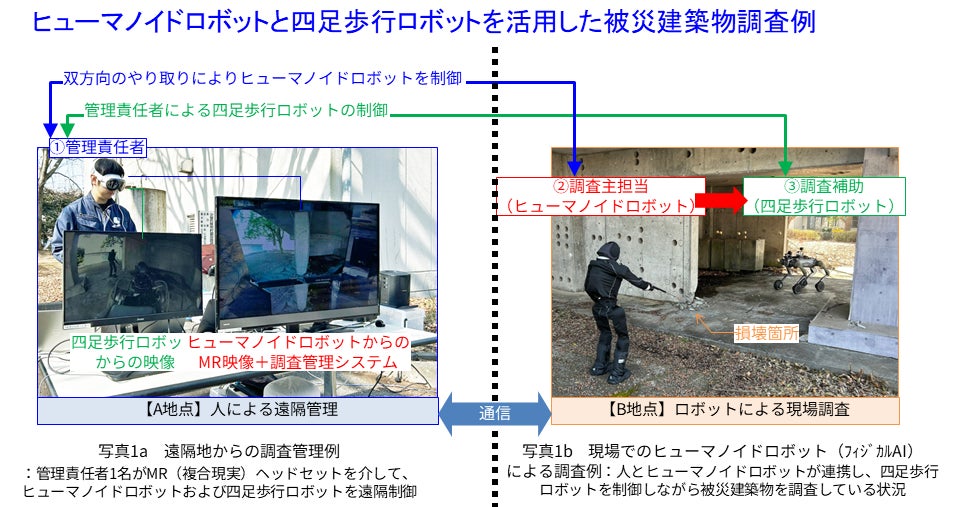
社会実装に向けた実証実験では、被災状況把握への適用可能性やシステムの有用性を確認済み。被災建築物調査を想定した一連の調査プロセスで、ヒューマノイド(二足歩行)と四足歩行ロボットによる協調動作を含む調査試験を実施し、専門技術者による「人による調査」と「ロボット群による無人調査」の特性を定量的に明らかにできたという。
今後は、特性差を埋めるためのセンサチューニングや、実運用上の課題として抽出された通信環境の安定化などを含め、実戦投入に向けたシステム改良を進めていく。
ポケット・クエリーズのプレスリリースはこちら